LSTM(Long Short-Term Memory,长短时记忆网络)
关于LSTM
LSTM(Long Short-Term Memory,长短时记忆网络)是一种特殊的循环神经网络(RNN),由Sepp Hochreiter和Jürgen Schmidhuber于1997年提出,专门设计用来解决传统RNN在处理长序列时遇到的梯度消失/爆炸问题。
核心特点与优势
- 记忆长依赖关系:能够学习并记住数百步之前的输入信息
- 门控机制:通过精密的门控系统控制信息的流动
- 梯度稳定性:有效缓解了训练过程中的梯度问题
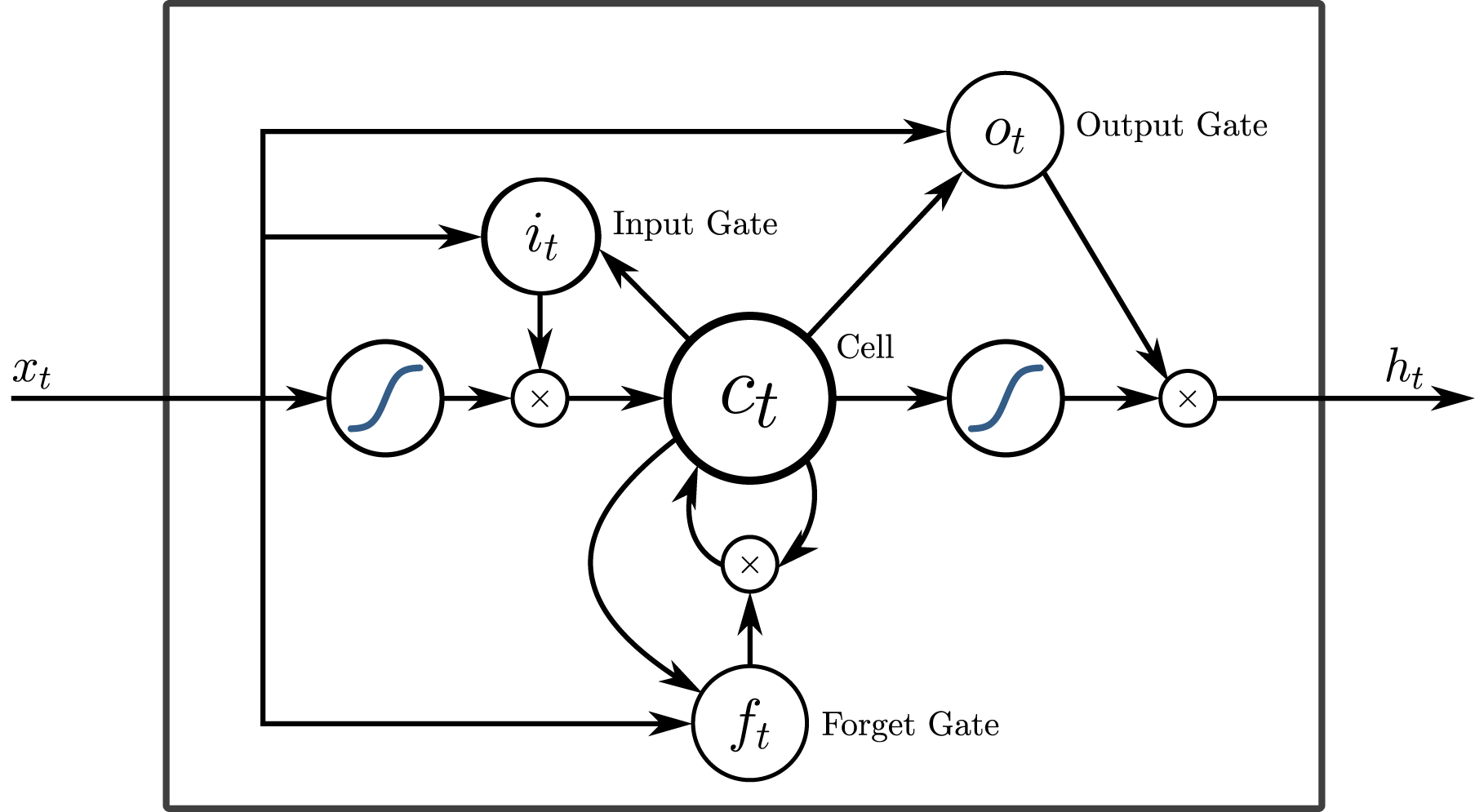
核心结构:三个门控制单元
LSTM的核心是细胞状态(Cell State),像一条“传送带”,贯穿整个时间序列。通过三个门控制信息的流动:
1.遗忘门(Forget Gate):决定从细胞状态中丢弃哪些信息
$$ f_t = \sigma(W_f \cdot [h_{t-1}, x_t] + b_f) $$ $\sigma$为Sigmoid函数,输出0-1之间的值;$W_f$为遗忘门的权重;$x_t$为当前时间步的输入;$h_{t-1}$为上一时刻的隐藏状态;$b_f$为遗忘门的偏置。注意,这里的
$$ [h_{t-1}, x_t] $$
是拼接操作,例如
$$ h_{t-1} = [0.2, 0.5, -0.1], x_t=[0.8, 0.3], [h_{t-1}, x_t] = [0.2, 0.5, -0.1, 0.8, 0.3]$$
2. 输入门(Input Gate):决定哪些新信息存储在细胞状态中
$$ i_t = \sigma(W_i \cdot [h_{t-1}, x_t]) + b_i$$
$$ \tilde{C}_t = \tanh(W_C\cdot[h_{t-1}, x_t] + b_C)$$
其中$W_i$为输入门的权重;$b_i$为输入门的偏置。$\tilde{C}_t$为候选记忆,它是基于当前输入和过去隐藏状态生成的新候选记忆内容。$b_C$是候选记忆的偏置。
3. 输出门(Output Gate):决定从细胞状态输出什么信息
$$ o_t = \sigma(W_o\cdot[h_{t-1}, x_t] + b_o) $$
$$ h_t = o_t \odot \tanh(C_t) $$
$W_o$为输出门的权重,$b_o$为输出门的偏置。$h_t$当前隐藏层的输出。需要注意的是,$h_t$使用的逐元素相乘,也即是Hadamard product,哈达玛积
更新机制:细胞状态的更新公式:
$$ C_t = f_t \odot C_{t-1} + i_t \odot \tilde{C}_t$$ $C_t$当前时刻的细胞状态,它等于 遗忘门 乘以 上一时刻的细胞状态 加上 当前输入门 乘以 当前候选记忆。 同样的$C_t$的计算也使用的逐元素相乘。
***LSTM的逐元素相乘是门控机制的核心,实现了信息的选择性流动这是LSTM相比RNN的主要创新之一:用门控(逐元素相乘)替代了直接覆盖。***
LSTM的工作流程:
$$ 输入 \rightarrow 遗忘门(决定忘记什么) \rightarrow 输入门(决定记住什么) \rightarrow 更新细胞状态 \rightarrow 输出门(决定输出什么) \rightarrow 隐藏状态输出$$
LSTM的网络结构图:
主要应用领域
- 自然语言处理:机器翻译、文本生成、情感分析
- 时间序列分析:股票预测、天气预测、设备故障预测
- 语音识别:语音转文本、语音合成
- 视频分析:动作识别、视频描述生成
优点与局限性
优点:
- 能够处理长序列依赖
- 门控机制使训练更稳定
- 在实践中表现优异
局限性:
- 参数较多,计算成本高
- 训练时间相对较长
- 可能过拟合,需要正则化
发展现状
虽然Transformer架构在某些任务上已经超越了LSTM,但LSTM仍然在许多实际应用中广泛使用,特别是在数据量较小或序列长度不是特别长的场景中,因其结构相对简单且在许多任务上仍有良好表现。 LSTM作为深度学习发展史上的重要里程碑,为序列建模任务奠定了坚实的基础,其设计思想至今仍在影响新模型架构的开发。
计算过程
一个超简化的计算举例
场景设定:假设我们有一个超简化的LSTM单元,其维度仅为1(所有向量都是标量),方便我们计算。我们处于时间步 $t$。
- 输入:当前输入$x_t = 0.8$
- 上一时刻的隐藏状态:$h_{t-1} = 0.5$
- 上一时刻的细胞状态:$ C_{t-1} = 1.2 $ 这是LSTM的“长期记忆”
- 权重和偏置:为了简化,我们假设所有权重 $W_f, W_i, W_C, W_o$ 都为 0.5,所有偏置 $b_f, b_i, b_C, b_o$ 都为 0.1。
- 激活函数:$\sigma$为Sigmoid,$\tanh$为双曲正切。
第一步:计算遗忘门
公式:$$ f_t = \sigma(W_f \cdot [h_{t-1}, x_t] + b_f)$$
$$ f_t = \sigma(0.5 \times [0.5, 0.8] + 0.1) = \sigma(0.5\times 0.5 + 0.5 \times 0.8 + 0.1) = \sigma(0.75) $$
$$ \sigma(0.75) = \frac{1}{1+e^{-0.75}} \approx 0.679 $$
所以 $f_t \approx 0.679 $表示我们打算保留大部分(约68%)的上一时刻细胞状态,遗忘约32%。
第二步:计算输入门 $i_t$ 和候选记忆 $ \tilde{C}_t$
A 输入门
$$ i_t = \sigma(W_i \cdot [h_{t-1}, x_t]) + b_i$$
$$ i_t = \sigma(0.5 \times [0.5, 0.8] + 0.1) = \sigma(0.5\times 0.5 + 0.5 \times 0.8 + 0.1) = \sigma(0.75) \approx 0.679 $$
所以,$i_t \approx 0.679 $。表示我们打算让约68%的新信息加入记忆。
B 候选记忆$\tilde{C}_t$公式:
$$ \tilde{C}_t = \tanh(W_C\cdot[h_{t-1}, x_t] + b_C)$$
$$ \tilde{C}_t = \tanh(0.5 \times [0.5, 0.8] + 0.1) = \tanh(0.75) $$
$$ \tanh(0.75) = \frac{e^{0.75} - e^{-0.75}}{e^{0.75} + e^{-0.75}} \approx 0.635 $$
所以,$\tilde{C}_t ≈ 0.635$。这是基于当前输入和过去隐藏状态生成的新候选记忆内容。
第三步:更新细胞状态$C_t$
这是LSTM的核心步骤,我们结合“遗忘”和“输入”来更新长期记忆。公式:
$$ C_t = f_t \odot C_{t-1} + i_t \odot \tilde{C}_t$$
1. $ f_t \cdot C_{t-1} = 0.679 \times 1.2 \approx 0.815 $ (这是保留的旧记忆)
2. $ i_t \cdot \tilde{C}_t = 0.679 \times 0.635 \approx 0.431 $ (这是要添加的新记忆)
$$C_t = 0.815 + 0.431 = 1.246$$
所以,新的长期记忆 $C_t \approx 1.246$。可以看到,它从原来的 1.2 更新为了 1.246,结合了旧信息和新信息。
第四步:计算输出门 $o_t$ 和当前隐藏状态 $h_t$
输出门决定基于当前的细胞状态,我们要输出多少信息到隐藏状态(即短期记忆/上下文信息)。
A 输出门
$$ o_t = \sigma(W_o\cdot[h_{t-1}, x_t] + b_o) $$
$$ o_t = \sigma(0.5 \times [0.5, 0.8]) + 0.1) = \sigma(0.75) \approx 0.679 $$
所以,$o_t \approx 0.68$。表示我们打算输出约68%的当前细胞状态信息。
B. 当前隐藏状态
$$ h_t = o_t \odot \tanh(C_t) = 0.679 \times \tanh(1.246) \approx 0.575 $$
所以,当前隐藏状态 $h_t ≈ 0.575$。这个 $h_t$ 会作为LSTM单元在当前时间步的输出,并传递给下一个时间步,同时也会用于计算当前时间步的预测(如果需要)。这个时间步的计算就此完成。我们得到了:
新的长期记忆:$C_t = 1.25$
新的隐藏状态(输出):$h_t = 0.58$
这个过程在下个时间步$ t+1$ 会完全重复。
LSTM的输出层
LSTM是一个序列处理器,它的主要任务是:
- 逐步处理输入序列
- 提取时序特征
- 生成包含整个序列信息的隐藏状态,例如上面新的隐藏状态$h_t$包含了序列的"理解",但还不是分类结果。
下面详细解释为什么LSTM后面需要接分类层,以及LSTM和分类层的不同角色。
1. 分类任务的需求:
我们需要一个明确的决策:如:$$正面情感 \rightarrow 概率 0.85 \\\\ 负面情感 \rightarrow 概率 0.15$$
问题:LSTM的隐藏状态是高维特征向量,不是概率分布!
2. 为什么不能直接用LSTM的输出?
假设隐藏状态维度=128 $$ h_{\text{last}} = [0.34, -0.12, 0.89, \cdots, 0.56] \quad 128个值$$
而我们需要的是一个$0\sim 1$之间的概率值 :
$$ \text{prob positive} = 0.85 \quad \text{prob negative} = 0.15 $$
三个主要问题:
- 问题1:维度不匹配:LSTM输出:128维特征向量,分类需要:2维概率向量(二分类)
- 问题2:值域不合适:LSTM隐藏状态:任意实数(如:tanh输出在(-1,1)),分类概率:需要在(0,1)之间且和为1
- 问题3:缺乏可解释的决策边界: LSTM学到的是特征表示,不是决策规则。
3. 分类层的具体作用
结构示意图:$$ 原始句子 \rightarrow 词向量 \rightarrow \text{LSTM} \rightarrow 最后隐藏状态 (特征提取器) \rightarrow 分类层 \rightarrow 情感概率(决策器) $$
4. 分类层的实现
分类层(通常就是全连接层 + Softmax),Softmax的作用:
- 归一化:确保所有类别概率和为1
- 概率解释:将分数转换为概率
- 放大差异:突出最高概率的类别
5. 分类层一定要含隐藏层吗?
不一定需要隐藏层! 三种常见的分类层架构
- 直接投影(无隐藏层)
- 单隐藏层
- 多隐藏层
不同场景下的选择建议
简单任务,充足数据:无需隐藏层;复杂任务,中等数据:需要一个隐藏层;多任务或领域特定:多个隐藏层;
实验对比:有 vs 无隐藏层:
| 指标 | 无隐藏层 | 有隐藏层 |
| 参数数量 | 少 | 多 |
| 训练速度 | 快 | 慢 |
| 过拟合风险 | 低 | 高 |
| 特征组合能力 | 弱 | 强 |
| 适合任务复杂度 | 低 | 中高 |
反向传播计算过程(BPTT)
反向传播的目标是计算损失函数对所有权重参数的梯度,然后用梯度下降法更新参数。LSTM 的反向传播比普通 RNN 复杂,因为涉及细胞状态和三个门控。
1. LSTM前向传播总结:
输入拼接:$$ z_t = \begin{bmatrix} h_{t-1} \\ x_t \end{bmatrix} \in \mathbb{R}^{d_h + d_x}$$
遗忘门: $$ f_t = \sigma(W_fz_t + b_f)$$
输入门: $$ i_t = \sigma(W_iz_t + b_i)$$
候选细胞状态: $$ \tilde{C}_t = \tanh(W_Cz_t + b_C)$$
细胞状态更新: $$ C_t = f_t \odot C_{t-1} + i_t \odot \tilde{C}_t$$
输出门: $$ o_t = \sigma(W_oz_t + b_o)$$
隐藏状态: $$ h_t = o_t \odot \tanh(C_t)$$
分类层(分类层): $$ y = W_yh_t + b_y, \hat{y}_t = \text{Softmax}(W_yh_t + b_y) $$其中$W_y, b_y$分别是分类层的权重和偏置。
2. 梯度定义和反向传播总览
定义以下梯度:
- $\delta W_y = \frac{\partial L}{\partial W_y}$: 分类层
- $\delta h_t = \frac{\partial L}{\partial h_t}$: 隐藏状态的梯度
- $\delta C_t = \frac{\partial L}{\partial C_t}$: 细胞状态的梯度
- $\delta f_t = \frac{\partial L}{\partial f_t}$: 遗忘门的梯度
- $\delta i_t = \frac{\partial L}{\partial i_t}$: 输入门的梯度
- $\delta o_t = \frac{\partial L}{\partial o_t}$: 输出门的梯度
- $\delta \tilde{C}_t = \frac{\partial L}{\partial \tilde{C}_t}$: 候选细胞状态的梯度
损失函数对于输出层的梯度 $$ \frac{\partial L}{\partial y}= \hat{y}_t - y_t $$
$$ \frac{\partial L}{\partial W_y} = \frac{\partial L}{\partial y} \frac{\partial y}{\partial W_y} = (\hat{y}_t - y_t)h_t $$
$$ \frac{\partial L}{\partial b_y} = \frac{\partial L}{\partial y} \frac{\partial y}{\partial b_y} = \hat{y}_t - y_t $$
$$ \frac{\partial L}{\partial h_T} = \frac{\partial L}{\partial y} \frac{\partial y}{\partial h_T} = (\hat{y}_t - y_t)W_y $$
$h_T$是最后时间步的隐藏输出。
3. 沿时间反向传播(BPTT)
假设最后一个时间步$t = T$,假设$T=6$我们从最后一个时间步开始反向计算到$ t=1$。对于每个时间步,我们需要计算:
- 对当前隐藏状态 $h_t$ 的梯度
- 对当前细胞状态 $C_t$ 的梯度
- 对各个门控和参数的梯度
时间步 $t=6$ 的反向传播
已知:
- 来自分类层的梯度:$$ δ_{h6} = \frac{\partial L}{\partial h_T} $$
- 来自未来的梯度(t=6是最后一步,所以没有来自未来的梯度)
定义符号:
- $\delta_{h_t} $:损失对 $h_t$ 的总梯度
- $\delta_{C_t} $:损失对 $C_t$ 的梯度
- $δ_{h_\text{next}}$ 和 $\delta_{C_\text{next}}$ 来自下一步(对 t=6 来说,这些为0)
- 通过 $h_t$:因为 $h_t = o_t \odot \tanh(C_t)$
- 直接流向下一步:因为 $C_t$ 会传给 $C_{t+1}$(对 t=6 没有下一步)
$C_t$ 的梯度有两个来源:
对于 $t=6$ 的具体计算:
回忆前向传播时:
$$ \begin{array}{l} h_6 = o_6 \odot \tanh(C_6) \\ o_6 = \sigma(z_{o_6}) \\ C_6 = f_6 \odot C_5 + i_6 \odot \tilde{C}_6 \\ \tilde{C}_6 = \tanh(z_{c_6}) \\ i_6 = \sigma(z_{i_6}) \\ f_6 = \sigma(z_{f_6}) \end{array}$$
其中:$ z_{o_6} = W_oz_6 + b_o,z_{c_6} = W_Cz_6 + b_C,z_{i_6} = W_iz_6 + b_i, z_{f_6} = W_fz_6 + b_f $
a) 计算 $\delta_{C_6}$:
$$ \frac{\partial h_6}{\partial C_6} = o_6 \odot (1 - \tanh(C_6)^2) \impliedby h_6 = o_6 \odot \tanh(C_6) \quad \because \tanh'(x) = 1-\tanh(x)^2$$
$$ \delta_{C_6} = \left( \frac{\partial L}{\partial h_6} \right) \odot \frac{\partial h_6}{\partial C_6} + \delta_{C_{\text{next}}} \quad \delta_{C_{\text{next}}} = 0 $$
b) 计算 $\delta_{o_6}$:
$$ \frac{\partial h_6}{\partial o_6} = \tanh(C_6) \impliedby h_6 = o_6 \odot \tanh(C_6) $$
$$ \delta_{o_6} = \frac{\partial L}{\partial h_6} \odot \frac{\partial h_6}{\partial o_6} = \delta_{h_6} \odot \tanh(C_6) $$
$$ \delta_{z_{o_6}} = \frac{\partial L}{\partial h_6} \odot \frac{\partial h_6}{\partial o_6} \odot \frac{\partial o_6}{\partial z_{o_6}} = \delta_{o_6} \odot \left(\sigma({z_{o_6}}) \odot (1-\delta({z_{o_6}}))\right) = \delta_{o_6} \odot [o_6 \odot (1-o_6)] $$
c) 计算 $\delta_{\tilde{C}_6}$:
$$ \frac{\partial C_6}{\partial \tilde{C}_6} = i_6 \impliedby C_6 = f_6 \odot C_5 + i_6 \odot \tilde{C}_6 $$
$$ \delta_{\tilde{C}_6} = \frac{\partial L}{\partial C_6} \odot \frac{\partial C_6}{\partial \tilde{C}_6} = \delta_{C_6} \odot i_6 $$
$$ \delta_{z_{c_6}} = \frac{\partial L}{\partial C_6} \odot \frac{\partial C_6}{\partial \tilde{C}_6} \odot \frac{\partial \tilde{C}_6}{\partial z_{c_6}} = \delta_{\tilde{C}_6} \odot i_6 \odot (1-\tilde{C}^2_6) $$
d) 计算 $\delta_{i_6}$:
$$ \frac{\partial C_6}{\partial i_6} = \tilde{C}_6 \impliedby C_6 = f_6 \odot C_5 + i_6 \odot \tilde{C}_6 $$
$$ \delta_{i_6} = \frac{\partial L}{\partial h_6} \odot \frac{\partial h_6}{\partial C_6} \odot \frac{\partial C_6}{\partial i_6} = \delta_{C_6} \odot \tilde{C}_6 $$
$$ \delta_{z_{i_6}} = \delta_{i_6} \odot \frac{\partial i_6}{\partial z_{i_6}} = \delta_{i_6} [i_6 \odot (1-i_6)] \impliedby i_6 = \sigma(z_{i_6}) $$
e) 计算 $\delta_{f_6}$(注意:$f_6$作用于$C_5$,所以梯度会传播到$C_5$):
$$ \frac{\partial C_6}{\partial f_6} = C_5 \impliedby C_6 = f_6 \odot C_5 + i_6 \odot \tilde{C}_6 $$
$$ \delta_{f_6} = \delta_{C_6} \odot C_5 $$
$$ \frac{\partial f_6}{\partial z_{f_6}} = f_6 \odot (1-f_6) $$
$$ \delta_{z_f6} = \delta_{f_6}\odot \frac{\partial f_6}{\partial z_{f_6}} $$
f) 计算对$C_5$的梯度::
$$ \frac{\partial C_6}{\partial C_5} = f_6 \impliedby C_6 = f_6 \odot C_5 + i_6 \odot \tilde{C}_6 $$
$$ \delta_{C_5 \text{from} t_6} = \delta_{C_6} \odot f_6$$
g) 计算对$h_5$的梯度:
所有门计算都依赖于拼接向量 $[h_5, x_6]$,所以梯度会流向 $h_5$。对于每个门控变量 $g \in {z_{f_6}, z_{i_6}, z_{c_6}, z_{o_6}}:$
$$ \frac{\partial g}{\partial h_5} = W_g[:, :h] \quad W_g的前h列 $$
所以$\delta_{h_5}$累积来自四个门的梯度:
$$ \delta_{h_{5_\text{total}}} = W_f[:,:2]^T \cdot \delta_{z_{f_6}} + W_i[:,:2]^T \cdot \delta_{z_{i_6}} + W_c[:,:2]^T \cdot \delta_{z_{c_6}} + W_o[:,:2]^T \cdot \delta_{z_{o_6}} + \delta_{h_{\text{next}}}(这里为0) $$
时间步 $t=5$ 到 $t=1$
重复上述过程,但要注意:
- 每个时间步的 $\delta_{h_t}$ 有两个来源:1) 来自下一步的 $\delta_{h_\text{next}}$,2) 来自当前步的梯度计算
- 每个时间步的 $\delta_{C_t}$ 有两个来源:1) 来自下一步的 $\delta_{C_\text{next}}$(通过遗忘门),2) 来自当前步通过 $h_t$ 的梯度
4. 反向传播(BPTT)通用公式
计算当前时间步的$\delta_{C_t}$
$$ \delta_{C_t} = \delta_{C_\text{next}} \odot f_{t+1} + (\delta_{h_t} \odot o_t \odot (1 - \tanh^2(C_t)))$$
计算各个门的梯度
$$ \delta_{z_{o_t}} = \delta_{h_t} \odot \tanh(C_t) \odot o_t (1 - o_t) $$
$$ \delta_{z_{i_t}} = \delta_{C_t} \odot \tilde{C}_t \odot i_t \odot (1-i_t) $$
$$ \delta_{z_{f_t}} = \delta_{C_t} \odot C_{t-1} \odot f_t \odot (1-f_t) $$
$$ \delta_{z_{c_t}} = \delta_{C_t} \odot i_t \odot (1 - \tilde{C}^2_t) $$
计算对前一步的梯度
$$ \delta_{h_{t-1}} = W_f[:, :h] \cdot \delta_{z_{f_t}} + W_i[:,:h] \cdot \delta_{z_{i_t}} + W_c[:, :h] \cdot \delta_{z_{c_t}} + W_o[:, :h] \cdot \delta_{z_{o_t}} $$
$$ \delta_{C_{t-1}} = \delta_{C_t} \odot f_t $$
5. 计算参数梯度
对于每个时间步 $t$,我们得到四个门的梯度$\delta_{z_{f_t}}, \delta_{z_{i_t}}, \delta_{z_{c_t}}, \delta_{z_{o_t}}$ ,对权重参数的梯度是各个时间步的累加:
$$ \frac{\partial L}{\partial W_f} = \sum_{t=1}^T[\delta_{z_{f_t} \cdot \text{concat}_t}]$$
$$ \frac{\partial L}{\partial b_f} = \sum_{t=1}^T \delta_{z_{f_t}} $$
其他权重同理。
6. 对输入词向量的梯度:
$$ \delta_{x_t} = W_f[:, h:] \cdot \delta_{z_{f_t}} + W_i[:,h:] \cdot \delta_{z_{i_t}} + W_c[:, h:] \cdot \delta_{z_{c_t}} + W_o[:, h:] \cdot \delta_{z_{o_t}}$$
注意,词向量取权重的后$d_x$列。这可以用来更新词向量(如果词向量是可训练的)。
如何确定词向量是可训练的?词向量的三种训练模式:
- 模式1:不可训练(静态词向量)
- 模式2:完全可训练
- 模式3:部分可训练(微调)
如何确定词向量是否可训练?
if 数据量小:
使用预训练 + 冻结
elif 有高质量领域预训练:
使用预训练 + 微调
elif 数据量大且领域特殊:
从头训练
else:
预训练 + 微调(最常用)
在QkCalc中设计LSTM
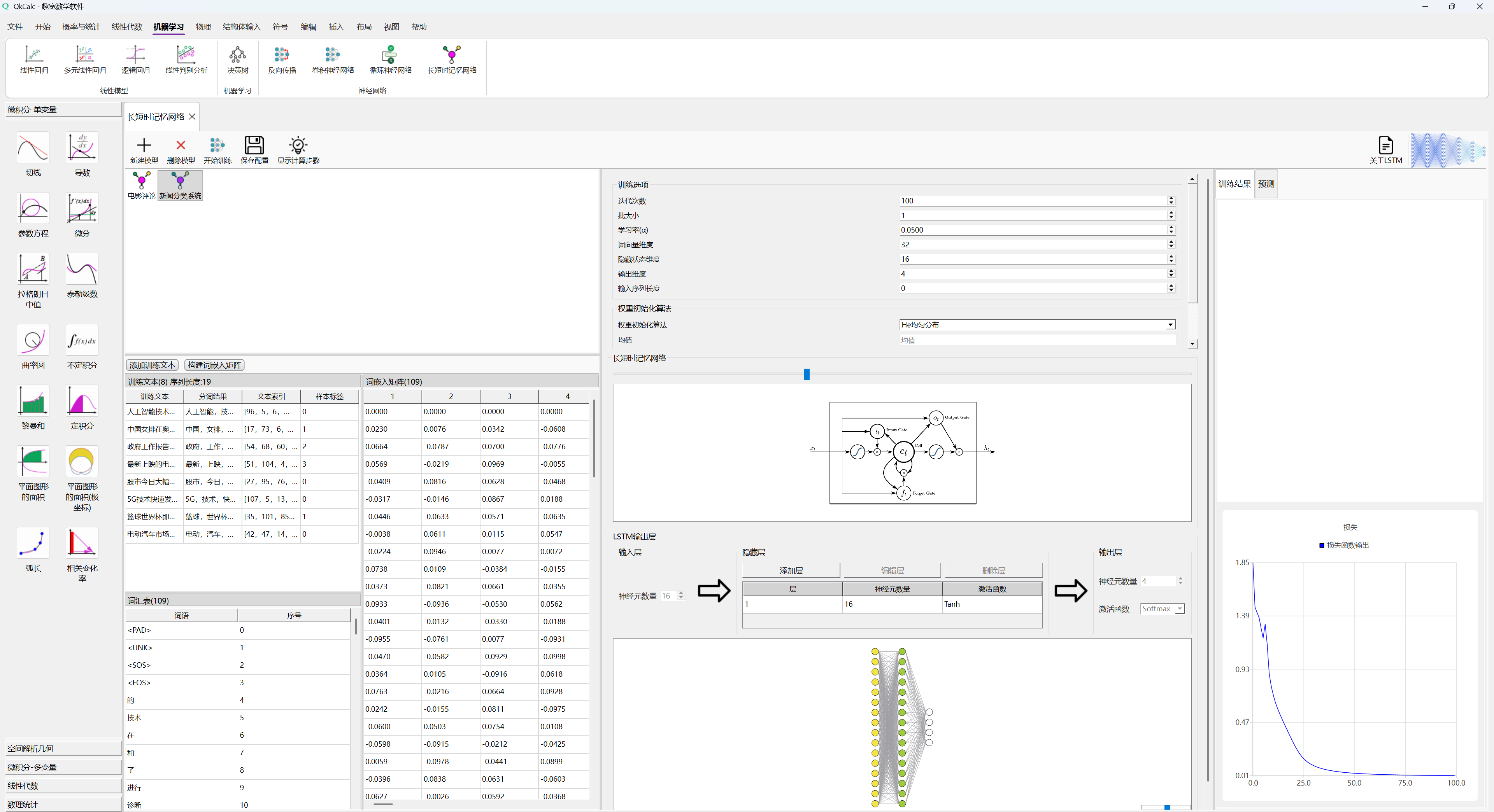
在QkCalc中,你可以通过“机器学习”中的“长短时记忆网络”来建立LSTM模型,通过设定参数、并可建立一个全连接层用于LSTM的输出层,通过快速生成词嵌入矩阵和样本进行训练和测试。